
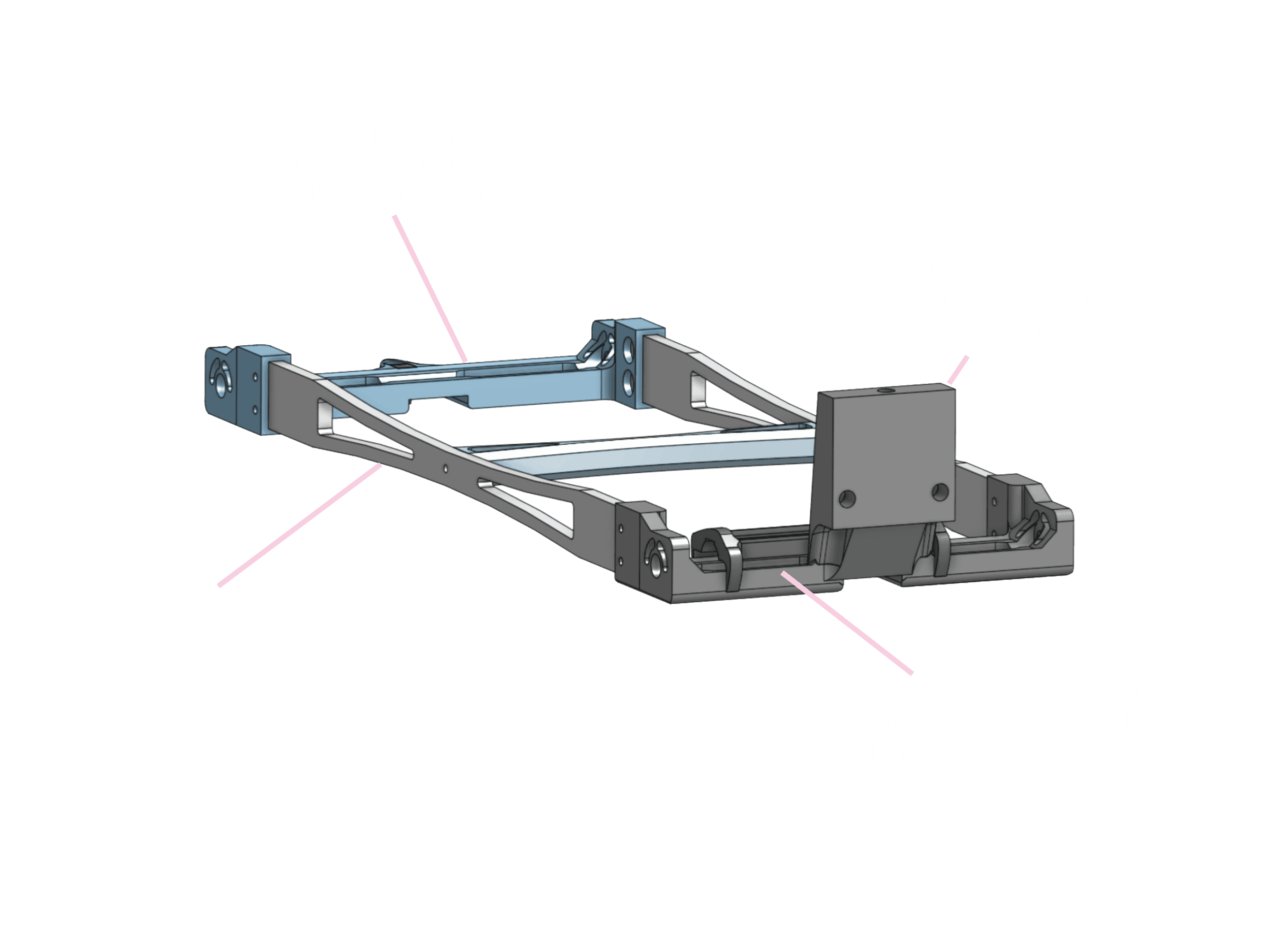
The cart
The objective was to transport a raw egg across 8 to 12 meters in 5 cm increments as fast as possible, then stop it before it hits a wall. No electronics allowed.
Braking was handled entirely mechanically using threaded rods, thrust bearings, and wingnuts that travel along the rods under deceleration, progressively increasing resistance until the cart stops. The chassis combined 3D-printed components and laser-cut wood panels, with an angled frame that clears a central obstacle while keeping weight low.
No FEA, no simulation, no formal analysis, but it built my intuition on tolerancing, 3D print orientation, and how mechanical assemblies behave under load.
Result: 8 meters in 1.8 seconds, national record as far as I have heard.
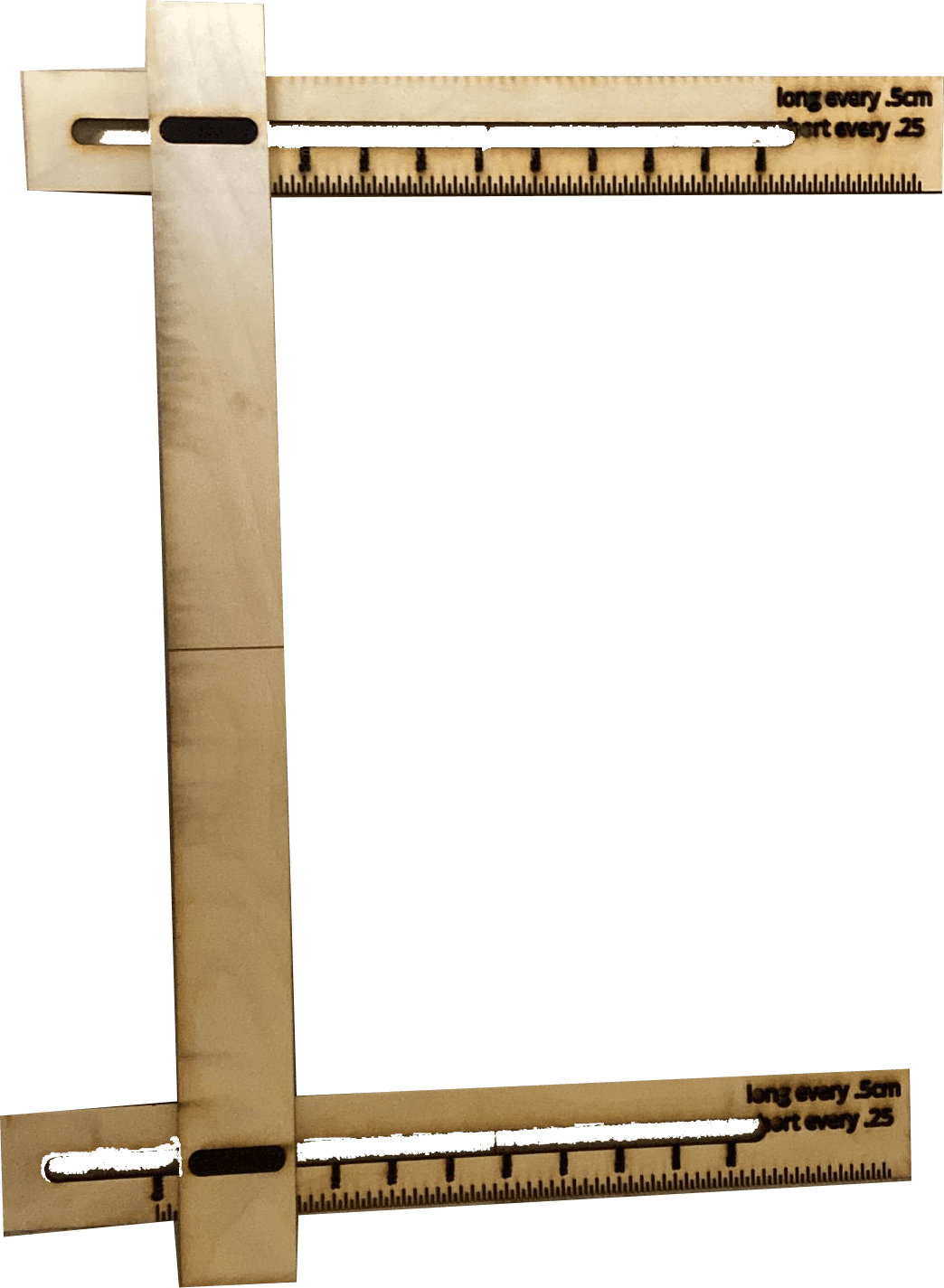
Calibration
Because the cart has to clear a central obstacle, the launch angle changes depending on the starting line. Test time is limited, so I built a laser-cut angled launcher that sets the correct angle automatically based on start position. Calibration came from systematic testing: mapping wheel rotations to stopping distance across multiple runs to dial in repeatable placement. One of my first real introductions to formal experimental design in an engineering context.

The launcher
The rules capped the launcher at 1m tall, 0.5x0.5m base, and 1.5kg. To maximize energy transfer, the falling mass never contacts the ground. Instead, it tensions a rubber band on the way down, which releases a latch mechanism at the bottom and launches the cart, converting all the stored energy into forward motion.
Building it meant learning to reinforce aluminum extrusions, work with sliding rails, and route pulleys in a way that actually transfers force cleanly.
