
Mars rover
-
Develop a suspension system that maintains traction over rough terrain.
Improve sample retrieval efficiency through innovative robotic solutions.
Enhance the rover’s mechanical performance for competition readiness.
-
Mechanical & Drone sub-team engineer
-
October 2024-March 2025
-
Onshape
Solidworks
Soft robotics
-
Pre-competition eight reduction measures saved approximately 10kg, improving the rover’s maneuverability and efficiency. The soft robotics grippers will allow for sample retrieval at approximately one sample every 30 seconds, demonstrating their effectiveness in rapid sample collection.

Design Process
Mechanical Sub-team
Objectives:
Design a durable and lightweight frame capable of supporting all life detection, electronics, navigation systems.
Ensure suspension keeps as many wheels engaged with the ground as possible to ensure traction.
Assisted in engineering a differential suspension system, enabling the rover to traverse rough terrain while maintaining traction on at least two wheels per side.
Developed load rigs to assess motor stability and test custom TPU wheels.
Fabricated paneling and structural components to optimize the rover’s main body.
Reduced weight in the final assembly by milling patterns into the struts after identifying excess mass.
Full Solidworks assembly
Drone sub-team
Objectives:
Speed up retrieval of samples
Autonomously navigate terrain
For rapid retrieval, the team evaluated that a soft gripper would be the quickest solution.
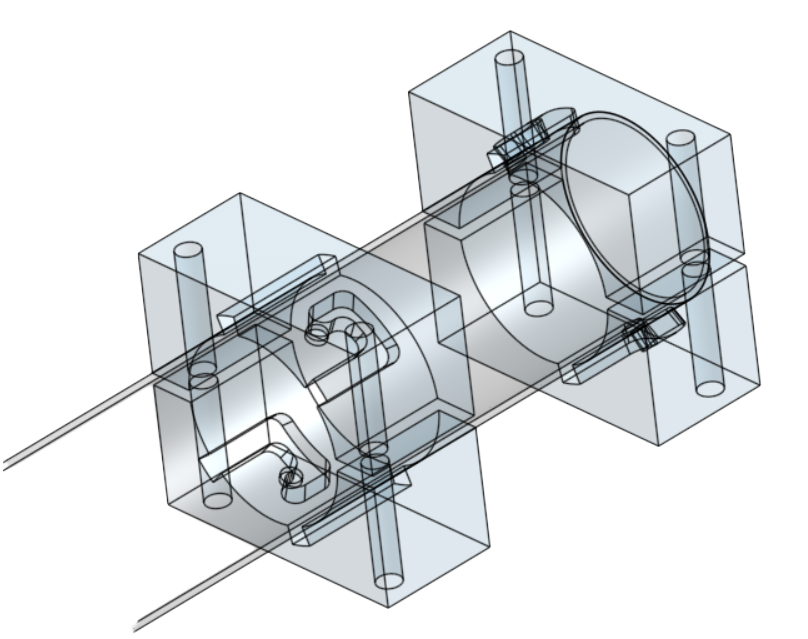
The objective is to use one servo to control four soft grippers, similar to the demo on the left provided by DIW3D.
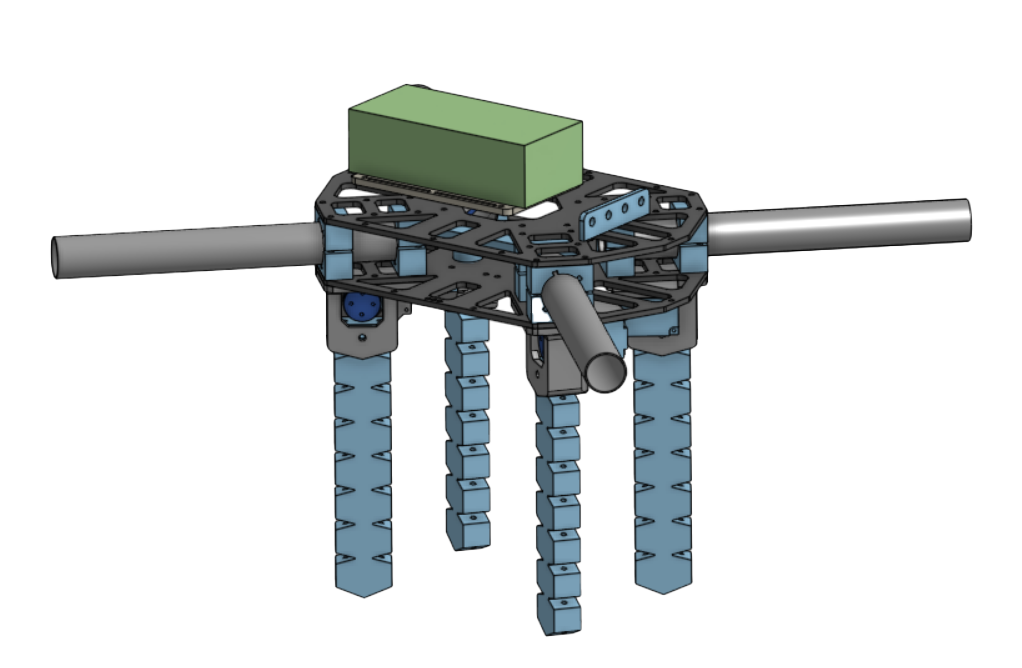
Assembly of the drone frame: The four grippers are visible, with mounts for servos that spin a pulley to contract the arms:
The gray rods connect to the propellers and are designed with a slot system for easy pop-out removal.